Trio Motion Technology Flex-6-Nano
Motion controller
- 2-64 axes
- EtherCAT
- Dual core 1GHZ ARM Cortex-A7 Processor
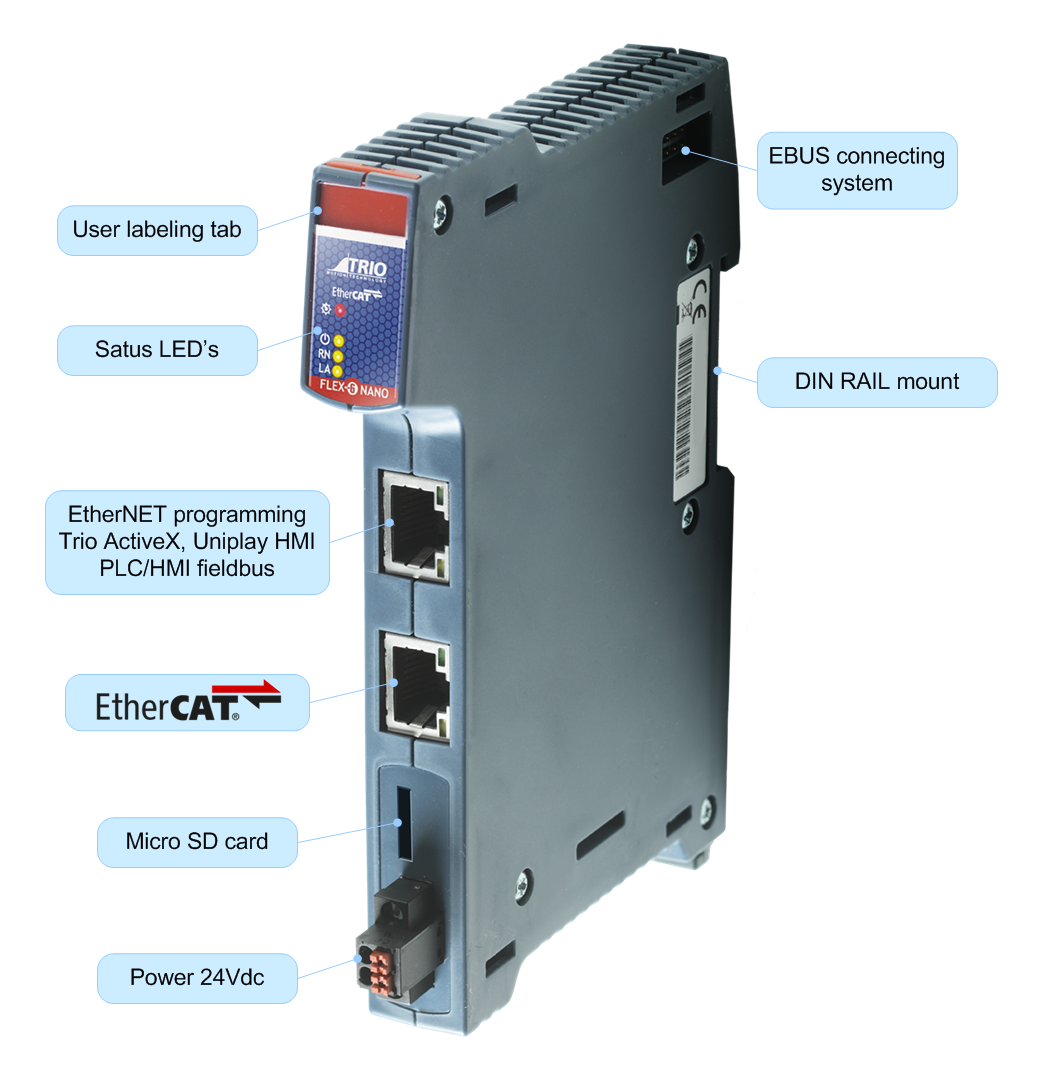
The Flex-6 Nano is a powerful stand-alone flexible and compact motion controller mounted on a DIN rail. The internal 1 GB DDR3 memory can be expanded to 32 GByte using a Micro SD card.
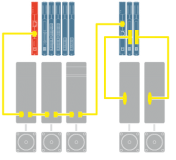
The Flex-6 Nano can be used as a stand-alone EtherCAT controller or can be connected directly to the Trio EtherCAT Flexslice system. In addition to synchronous control of EtherCAT servo drives, the system can be expanded to control stepper drives with pulse and direction, binary and analog I/O and other functionality that meets the EtherCAT standard.
The Flex-6 Nano is available for controlling 2, 4, 8, 16, 32 or 64 motor axles. All versions have 64 software axes that can be used as virtual axis or via EtherCAT as hardware-assigned servo or stepper axes or encoder input axes. Each axis can be programmed with linear, circular or helical or spherical interpolation, electronic cams and coupled axes.

The built-in Ethernet port can be used for programming and connection of the common HMI (Trio touch screen). But also for communication with a main controller via Profinet, Ethernet-IP, Modbus TCP-IP etc.
Programming and commissioning of the Flex-6 Nano is done using the powerful Motion Perfect development environment. With the help of multi-tasking application software, complex movements are easily programmed with the Trio MOTION-iX commands and integrated HMI editor. In addition, the standard IEC 61131-3 programming language is available for the development of a fully functional PLC program. The result is tested and optimized with the help of a motion controller simulator, HMI simulator, the 3D oscilloscope and 3D machine visualization tool.

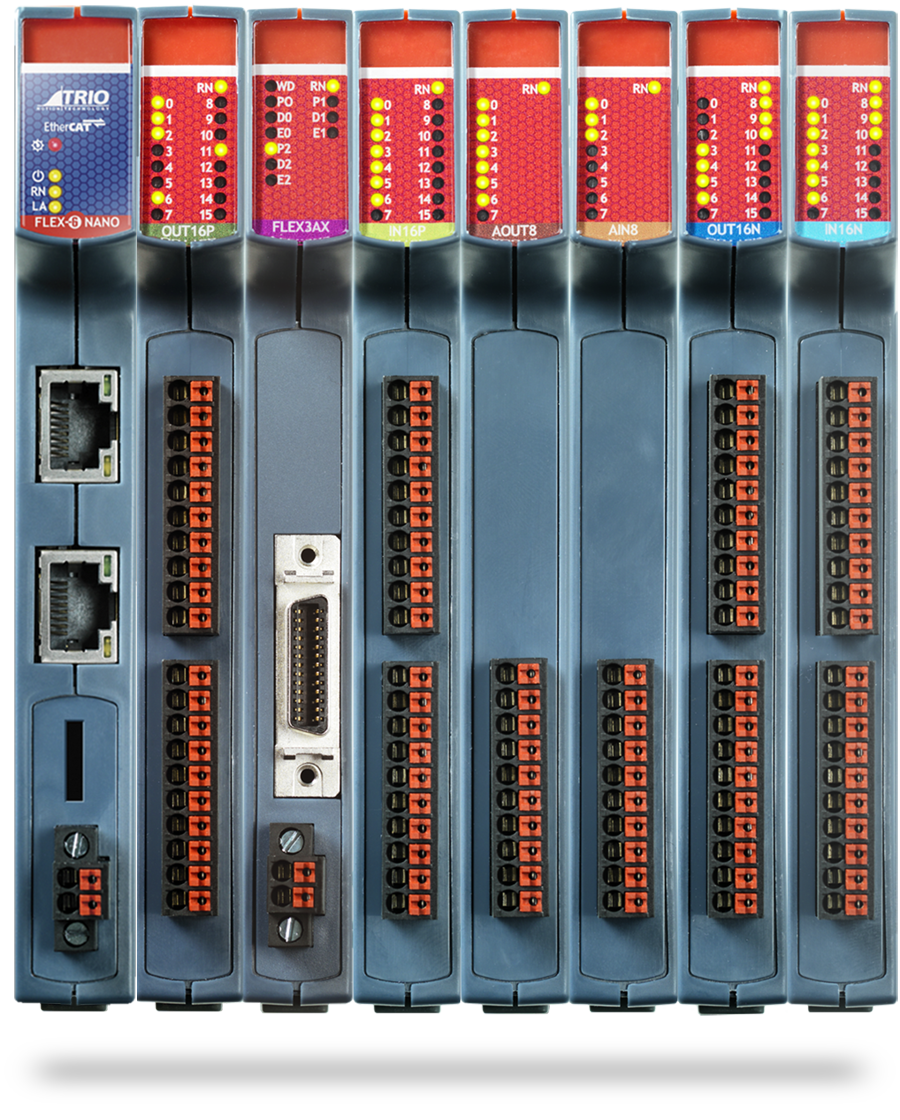
The Flexslice input / output modules from Trio offer a robust, fast and flexible solution for both motion control and general automation. EtherCAT cycle times up to 125μsec are supported and the bus coupler uses EBUS technology to bring all submodules to the EtherCAT network without degrading performance.
EtherCAT slave nodes (Flexslice modules) are connected via the Flexslice EBUS and the EtherCAT connector. Total number of slave nodes can be up to 128 including I / O and more complex devices.
Flexslice modules:

Production Line for Bending and Welding Tubes
Production line featuring a machine that forms aluminium plates into tubes, which are later placed into a water boiler during the production process.
A pick-and-place module from IAI picks up a plate and places it into the machine, where the plate enters the processing stage.
Several HSB gantries, driven by Stöber servo systems, transport the aluminium tube through the machine. At the different workstations, the tube is clamped using an Exlar actuator. For the welding process, the welding torch is mounted on a highly robust linear module from HSB and Stöber.
Because multiple axes move simultaneously within overlapping working areas, these movements must be controlled with extremely high precision.
For this reason, all axes are synchronized and communicate with each other through a central motion controller from Trio Motion Technology. High accuracy is therefore essential within this machine.

Pick-and-place with Leadshine steppers and Trio
Automated pick-and-place system for laboratories where blood samples are tested. The heart of the machine is the Trio Flex6Nano motion controller and touch screen. The many movements are driven with the Leadshine closed loop stepper motors and CS3E controllers. The communication between the Trio control and 17 stepper drives is based on EtherCAT.

Pick & Place laboratory with HSB and Trio
Fully automatic laboratory based on a 3-axis servo system for sample analysis in the minerals industry. The pick and place system with a stroke of nearly 5 meters is PC controlled. The control cabinet is designed and implemented by ATB Automation.
 NL
NL FR
FR EN
EN