Trio Motion Technology FLEX 3-AXIS / P375
Motion controller, I/O module
- Flexslice system / EtherCAT
- 3 stepper outputs or 3 encoder inputs
- Expansion via EtherCAT Coupler
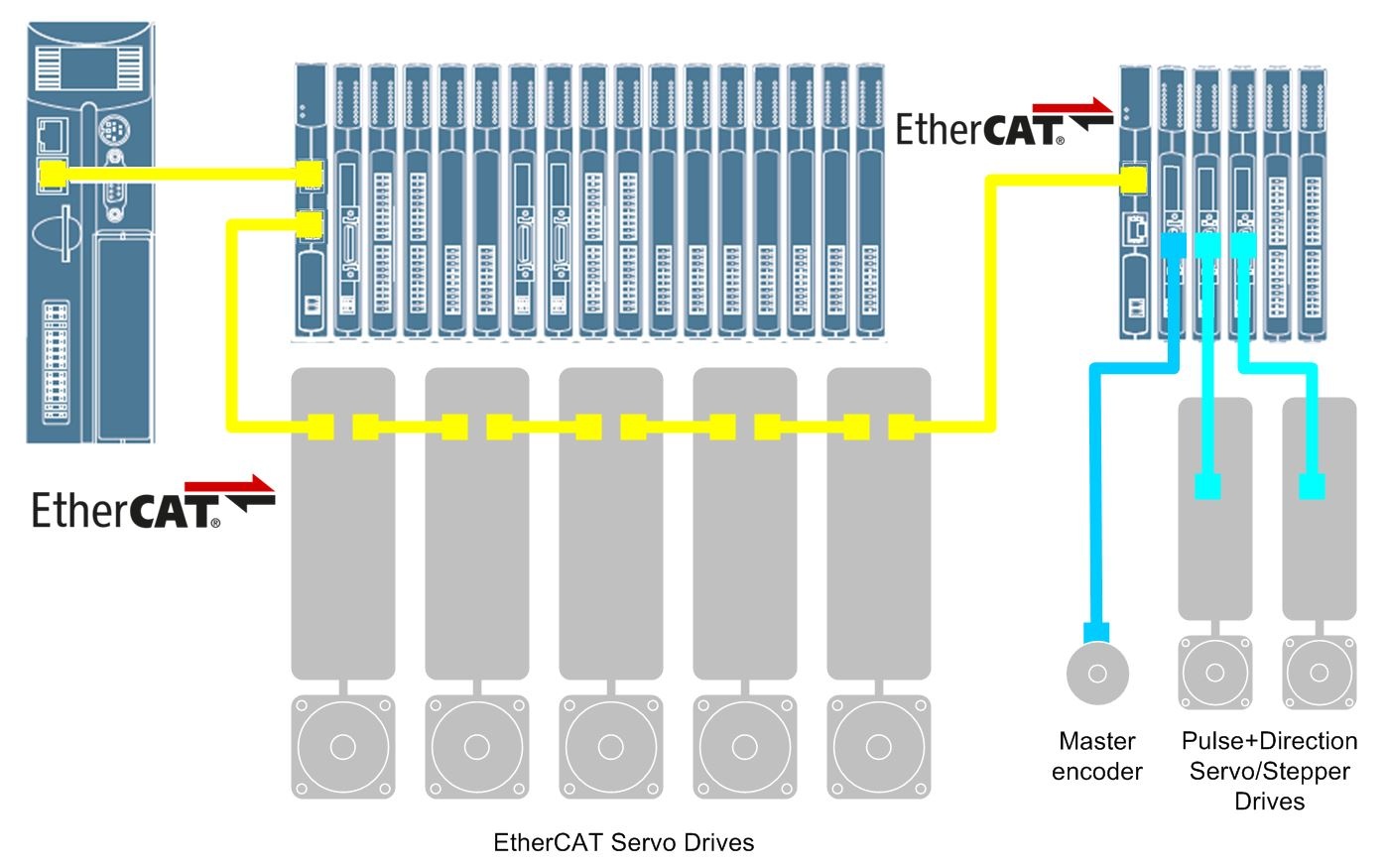
Control of up to 3 step axes with pulse and direction signal or simulated encoder signal or reading an external encoder signal in combination with a Trio Motion Controller equipped with EtherCAT such as the Flex-6 Nano, or PC-MCAT or MC6N-ECAT.
A single MDR connector provides a reliable shielded 26-pin connection for high-speed signals. The P375 is compatible with most high resolution microstep drives.
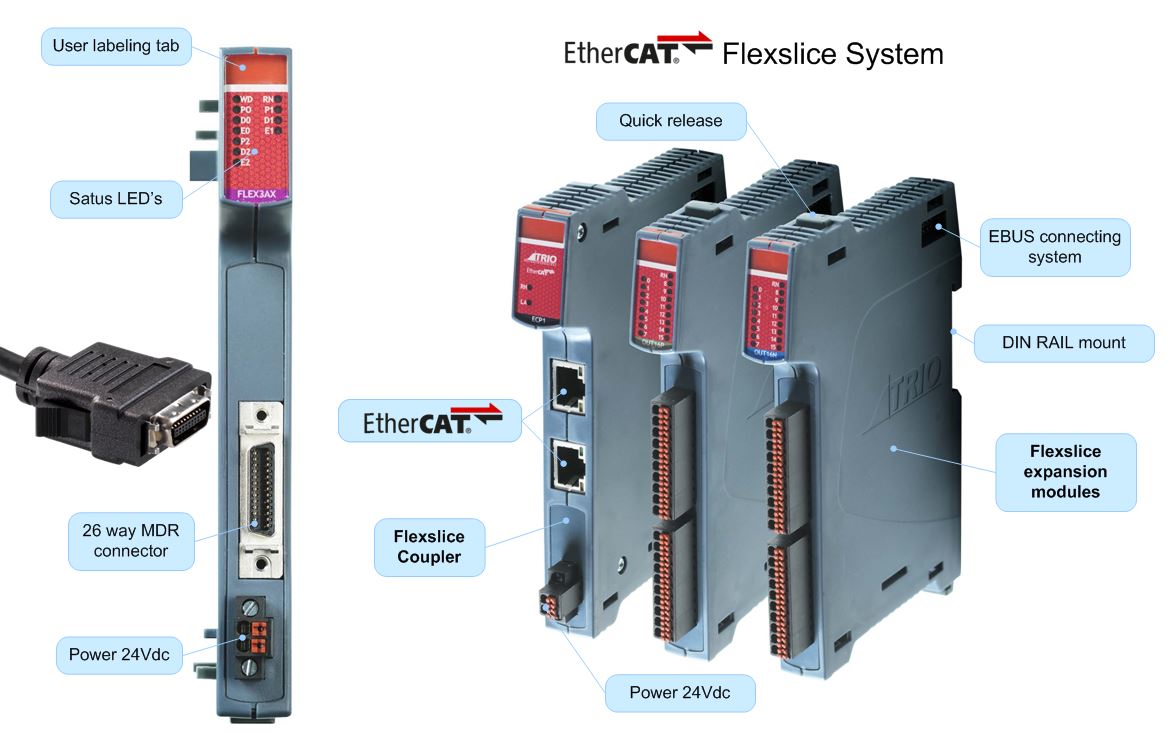
The EtherCAT Flexslice System is designed for fast, flexible expansion of motion applications and can be used with Trio or 3rd Party EtherCAT Masters. The Coupler is connected to the network via the top Ethernet interface. The bottom RJ45 socket can be used to connect other EtherCAT devices on the same line.
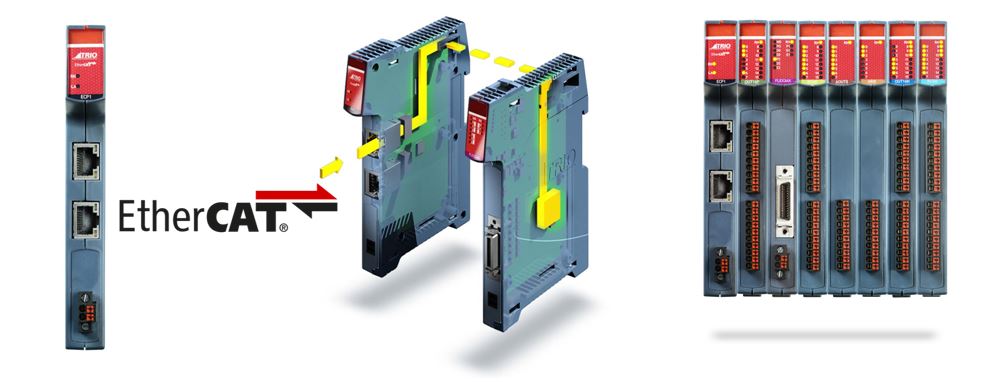
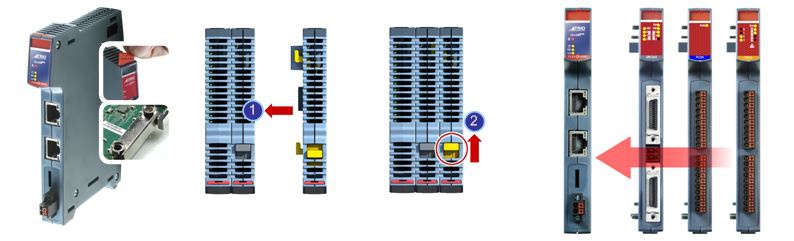
The EtherCAT Coupler supports up to 16 input / output modules (max 8 Flex 3 axis modules) with a positive mechanical interlock and bus connector, enabling a reliable EBUS connection through the backplane. The complete assembly can be mounted on DIN rail. The link converts the passing telegrams from the Ethernet 100BASE-T to the EBUS signal format.
In the EtherCAT network, the Coupler can be installed at any position in the Ethernet line, making it suitable for use near the master or remotely.
The Flexslice input / output modules from Trio provide a robust, fast and flexible solution for both motion control and general automation. EtherCAT cycle times of up to 125μsec are supported and the bus coupler uses EBUS technology to bring all submodules onto the EtherCAT network without sacrificing performance.
EtherCAT slave nodes (Flexslice modules) are connected via the Flexslice EBUS and the EtherCAT connector. Total number of slave nodes can be up to 128 including I / O and more complex devices.
Flexslice modules:
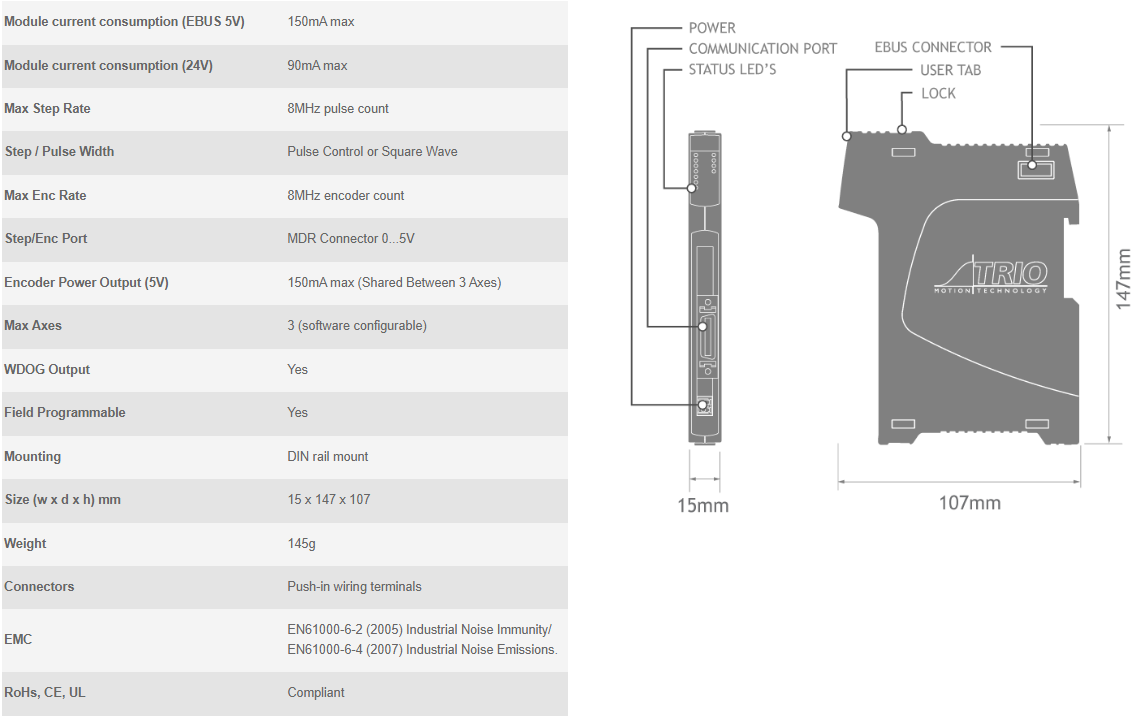
Specifications Flexslice Flex 3-Axis P375:
 NL
NL FR
FR EN
EN









