IAI Industrial Robots RCP6-SA
Linear units with carriage
24V stepper - absolute encoder
Payload 7-80 kg - ball screw spindle
1100 mm stroke - 1440 mm/s
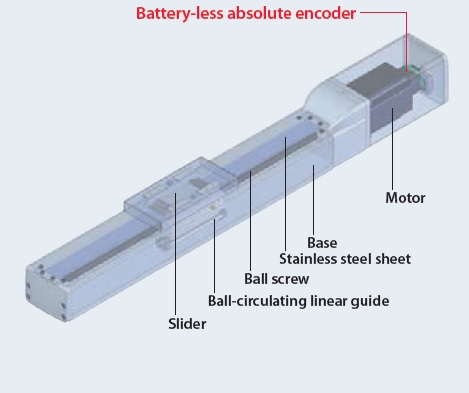
Linear actuator with carriage, 24Vdc stepper and absolute encoder equipped with ball screw spindle. With a base integrated ball circulating linear guide, it will be able to deal with moments in the pitching (Ma), yawing (Mb), and rolling (Mc) directions. By combining multiple axes, two-dimensional and three-dimensional operations are possible.
Examples:
Switching from rod-less air cylinder
Switching from self-made equipment with ballscrew, guide, and motor.
Using as base and movable axes of the cartesian system.
Work such as assembly, inspection, and measuring length that require high accuracy.
Production Line for Pressing and Welding Sensor Tubes
In this production line, sensor tubes are pressed and welded in several consecutive steps. The tubes are transferred from one operation to the next using IAI gantries.
The sensor tubes are fed into the machine using a Stöber K-EZ drive.
The tube is picked up by the gantry and placed into a welding position. A Stöber motor then rotates the tube, while another Stöber motor equipped with a laser welds the tube shut. A following gantry picks up the tube, places it onto a conveyor belt, and tests whether it is leak-tight.
Production Line for Bending and Welding Tubes
Production line featuring a machine that forms aluminium plates into tubes, which are later placed into a water boiler during the production process.
A pick-and-place module from IAI picks up a plate and places it into the machine, where the plate enters the processing stage.
Several HSB gantries, driven by Stöber servo systems, transport the aluminium tube through the machine. At the different workstations, the tube is clamped using an Exlar actuator. For the welding process, the welding torch is mounted on a highly robust linear module from HSB and Stöber.
Because multiple axes move simultaneously within overlapping working areas, these movements must be controlled with extremely high precision.
For this reason, all axes are synchronized and communicate with each other through a central motion controller from Trio Motion Technology. High accuracy is therefore essential within this machine.
Assembly parts with IAI RoboCylinders
In the production of parts for forklifts, pick-and-place systems are used, which are made up of RCP RoboCylinders of IAI Industrial Robots. For the horizontal movements, actuators are used with a carriage. For the vertical movement an actuator with driven rod is used. This places plastic parts in the chasis.
The positioning is controlled in the IAI PCON controllers. Communication with the parent PLC is very simple via digital inputs and outputs.
Scanner with Trio PC-MCAT and IAI
An oxygen scanner with a tray provided with 4x4 places for boxes (microtiterplates) in which 24, 48 or 96 seeds can be sealed airtight per tray. With the help of an oxygen sensor the oxygen consumption of each seed is measured over a specific period. The germination of the seeds is assessed on the base of the curve of the oxygen decrease within the airtightly sealed chambers. Using a touch screen, a scanning program is set and the measurement results are collected to be able to analyze them. The 22 ”touch screen and oxygen scanner are connected to the PC-MCAT via HDMI and USB.
The software for setting up via the touch screen and storing the measurement data is developed in Python and runs on the IPC part of the Trio PC-MCAT. The coordinates of the selected trays are sent directly to the motion controller integrated on the PC-MCAT via shared memory (API). From there, the IAI actuators are controlled via EtherCAT to the desired position and the oxygen sensor is placed above the correct room.
The IAI actuators are deliverd with drive and cabling. Specifications of the actuator like forces and number of mm each revolution of the motor are already fixed. Because of this a a quick and safe commissioning is guaranteed.
We use cookies on our website to create the most effective website possible for our users. Cookies are small text files that are sent to and stored on your computer, smartphone or other device for accessing the internet, whenever you visit a website. Cookies allow for us to measure and personalise. The cookies we use allow us to improve your experience when using our website and ensure the website performs as you expect it to. It also allows us to offer eg videos on our website and display social media share buttons. On this site, the cookies we use include 'analytics' cookies, to analyse how users use this site to help us make our website better for those who visit it regularly.
The settings below allow you to specify which cookies you accept. Please note that by not accepting all cookies, some parts of the site will not work properly.
 NL
NL FR
FR EN
EN