Stöber SR6
Safety function for SI6 or SC6 servo drive
- STO according to EN 61800-5-2
- PLe (Cat.4) according to EN ISO 13849-1
- Integrated in SB6, SI6 or SC6 servo drive
The SR6 safety function is an extension of the SB6, SI6 or SC6 servo drive. With the SR6 option the servo drive can be included as an actuator in the safety circuit (SRP / CS) for the redundant switching off of the torque (Safe Torque Off, STO).
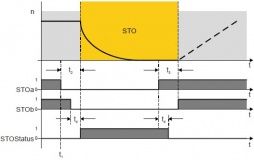
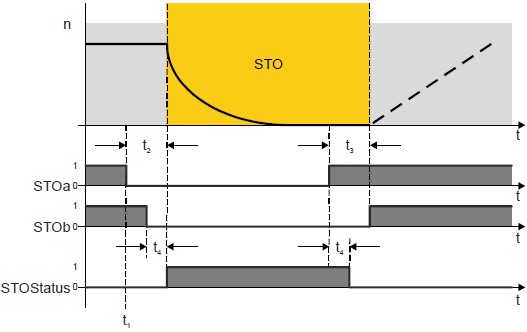
The safety function has a two channel design. Both channels STOa and STOb are independent and must both be connected to 24Vdc in order to enable the motor torque (STO function not active). In this situation, the STO status signal is also not active.
If one of the two (or both) channels STOa or STOb is not connected to 24Vdc, the PWM signal to the power stage of the servo drive is switched off redundantly so that the motor can no longer apply torque. The STO status signal is active in that case.
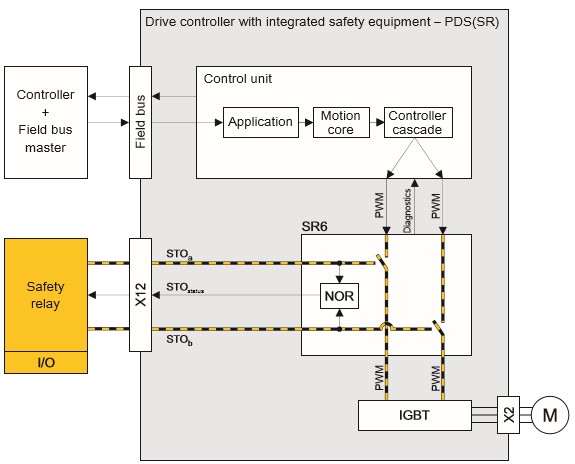
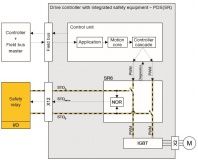
The signal flow of the STO function of the Stöber SI6 / SC6 servo drive with SR6 option is shown in the figure below. The STOa and STOb signals are switched using a safety relay or safety PLC (SRP / CS Logic). In this way a Performance Level PLe (Category 4) can be achieved according to EN ISO 13849-1 or SIL CL3 according to EN 62061 or SIL 3 according to EN 61508.
By using a safety relay or safety PLC with switch contacts incuding time delay, Safe Stop 1 function (SS1) on the SR6 option can also be realized according to EN 61800-5-2 and EN 60204-1. In addition to the Enable signal, a Quickstop signal is connected to the servo controller.
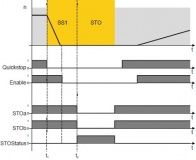
The signal flow of the SS1 + STO function of the Stöber SI6 / SC6 servo drive is shown in the diagram below.
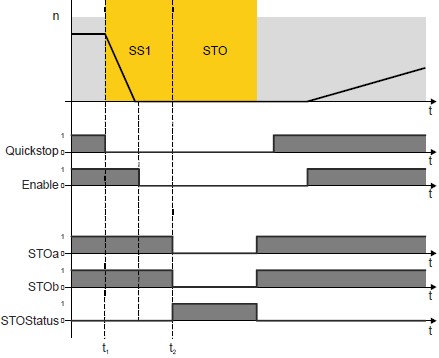
The safety relay or safety PLC activates the SS1 safety function at time t1 via the Quickstop signal. After the delay time in the safety relay or safety PLC, the STO signal (a + b) becomes active at time t2. This process corresponds to "time-controlled SS1" definition of EN 61800-5-2.
The safety functions STO and SS1-t concern the complete SI6 or SC6 module and are not axis pecific. On dual axis controllers, both axis are brought into a safe state at the same time. An activated SS1 can not be interrupted.
 NL
NL FR
FR EN
EN