Trio Motion Technology MC6N-ECAT
Contrôleur de mouvement
- 2 - 64 axes
- EtherCAT
- Dual core 1GHZ ARM Cortex-A7 Processor
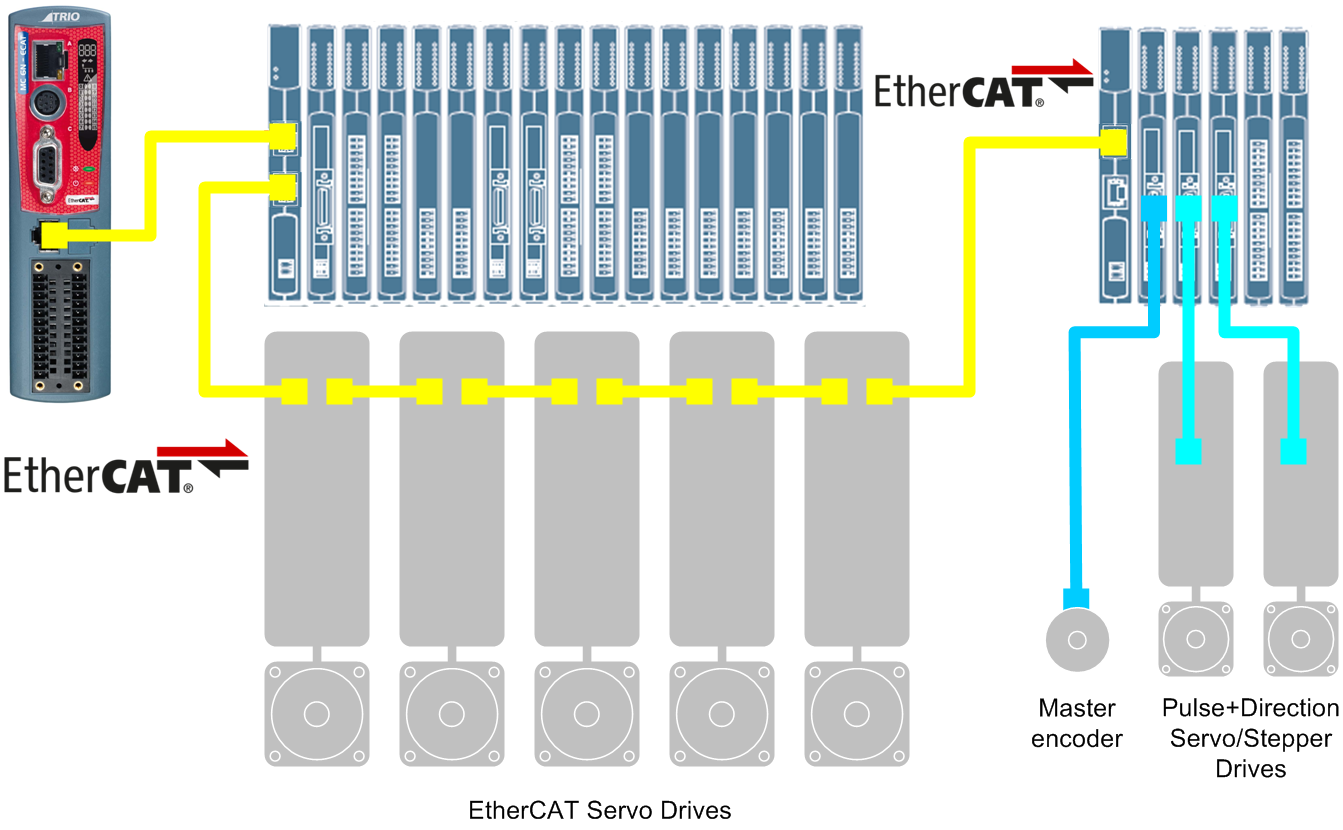
Le MC6N est un contrôleur de mouvement puissant, flexible et compact. Ce maître EtherCAT rapide peut contrôler jusqu'à 64 servocommandes EtherCAT ou contrôleurs pas à pas en tant que contrôleur autonome et est ainsi équipé en standard d'un codeur conventionnel ou d'un port pas à pas (axe flexible), 8 entrées binaires (dont 4 entrées d'enregistrement de position) et 8 bidirectionnelles. sorties. Le MC6N peut être connecté au système Trio EtherCAT Flexslice via le coupleur Flexslice EtherCAT pour des fonctionnalités supplémentaires. Cela permet d'étendre la commande MC6N avec des IO binaires et analogiques supplémentaires et / ou des codeurs supplémentaires conventionnels, des systèmes d'asservissement et des moteurs pas à pas.

Des versions du MC6N sont disponibles pour 2, 4, 8, 16, 32 et 64 axes moteurs. Toutes les versions sont équipées de 64 axes logiciels, chacun pouvant être utilisé comme axe virtuel ou via des axes assignés au matériel EtherCAT. Chaque axe peut être programmé avec une interpolation linéaire, circulaire ou hélicoïdale ou sphérique, des cames électroniques et des axes couplés.
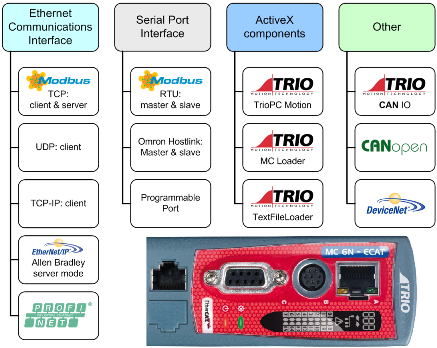
Le port Ethernet intégré, le port série et le port CAN font du contrôleur de mouvement Trio MC6N un contrôleur de mouvement extrêmement flexible pour la communication avec d'autres systèmes. Outre la programmation du contrôleur de mouvement et de la connexion IHM, divers protocoles sont disponibles pour la communication avec le PC et l'automate.
Les programmes utilisateur peuvent être écrits en langage Trio MOTION-iX multitâche basé sur Trio en utilisant le puissant logiciel d'application Motion Perfect pour effectuer facilement des mouvements complexes. De plus, le langage de programmation standard CEI 61131-3 est disponible, ce qui rend possible une programmation API entièrement fonctionnelle.

Les modules d'entrée / sortie Flexslice de Trio offrent une solution robuste, rapide et flexible pour le contrôle de mouvement et l'automatisation générale. Les temps de cycle EtherCAT jusqu'à 125 μs sont pris en charge et le coupleur de bus utilise la technologie EBUS pour amener tous les sous-modules sur le réseau EtherCAT sans dégrader les performances.
Les nœuds esclaves EtherCAT (modules Flexslice) sont connectés via le Flexslice EBUS et le connecteur EtherCAT. Le nombre total de nœuds esclaves peut être au maximum de 128, y compris les E / S et les périphériques plus complexes.
Modules Flexslice:

Robot portique pour panneaux solaires avec HSB, Wanshsin et Trio
Robot portique avec une plage de travail de 7600 x 400 x 2500 mm dans le plan X-Y-Z où les panneaux solaires sont empilés.
Les axes portiques HSB de la série Gamma avec double guidage constituent la base du système.
Les mouvements X-Y-Z sont réalisés avec des servomoteurs TRIO et des réducteurs planétaires Wanshsin.
Au bas de l'axe Z se trouve un manipulateur 3D piloté par les servomoteurs compacts. La masse de la pince et du panneau solaire, d'un poids total de 75 kg, s'accroche au réducteur planétaire Wanshsin de la série WAD.
L'interpolation du manipulateur 3D et du système XYZ est effectuée avec le contrôleur de mouvement Trio MC4N. Les servocommandes Estun sont contrôlées à partir du contrôle Trio via EtherCAT. Le contrôleur de mouvement Trio a été étendu avec un écran tactile et des modules d' E/S supplémentaires (système Trio EtherCAT Flexslice) pour le contrôle complet de la machine.

Palettiseur avec Trio Motion Controller et servo Leadshine
Robot palettiseur 4 axes flexible à programmé. Le coeur de cette application est le Trio Motion Controller où le robots 4 axes est contôlé via une transformation de coordonnées avec 4 servodrives Leadshine. La connection EtherCAT rapide entre le contrôleur Trio MC4N-ECAT et les drives assure une communication précise et simple.
En plus du Trio Motion Controller, des composants mécaniques sont également utilisés, tels qu’une couronne d’orientation pour la rotation et d’une crémaillère pour le mouvement horizontal. Chaque arbre servo est équipé d’un réducteur planétaire Stöber planétaire ou d’un réducteur à roue à vis sans fin.
Avantages de cette solution avec ATB Automation:
- Produits économiques de Leadshine et Trio Motion Technology
- Mise en service fiable et rapide avec EtherCAT
- Installation économique avec le bus EtherCAT
- Flexible et facile à programmer avec Trio Motion Perfect et RPS Kinematics
- Paquet Ensemble complet de produits complet d’ATB Automation
- Calcul et sélection des servomoteurs et des réducteurs engrenages
- Formation et support de motion controller, HMI et servodrives
Système de la manutention des bouteilles de gaz - solution complète ATB Automation
Dirigé par l'équipe project d'ATB Automation.
Un système composé d'unités linéaires XYZ HSB Delta-S avec vis a bille et Stöber moteur EZ-servo (l'axe X et Z) et HSB-Beta unité Z linéaire avec une courroie crantée et Stöber PE-EZ servo réducteur planétaire. Le système est capable de se déplacer dans des bouteilles de gaz de 20 kg dans le portée de 1000 x 1000 x 300 mm, sans guides externes.
Le contrôle central est le contrôleur Trio MC4 avec la communication Delphi via des commandes OCX. Le contrôleur Trio conduite les régulateurs Stöber SD6 via EtherCAT.

Couper des gaufres avec Trio, Wanshsin et HSB
Une solution complète d’ATB Automation et appliqué pour le découpage de gaufres.
Deux systèmes de servo-commande linéaire veillent à l’entrée et la sortie des plaques de gaufres. Un troisième axe est utilisé pour la pression du couteau.
Comme commande le Trio MC4N Motion Controller à muliples axes. Les mouvements sont ainsi enregistrés et mises en correspondance. Un display Trio Uniplay est utilisé pour le controle.
Le controleur Trio Motion contrôle en temps réelle le drive servo via le EtherCAT bus rapide.
L’armoire de commande, la programmation et la mise en service du système a été réalisé par l’équipe de projet d’ATB Automation.
 NL
NL FR
FR EN
EN