MotionPerfect
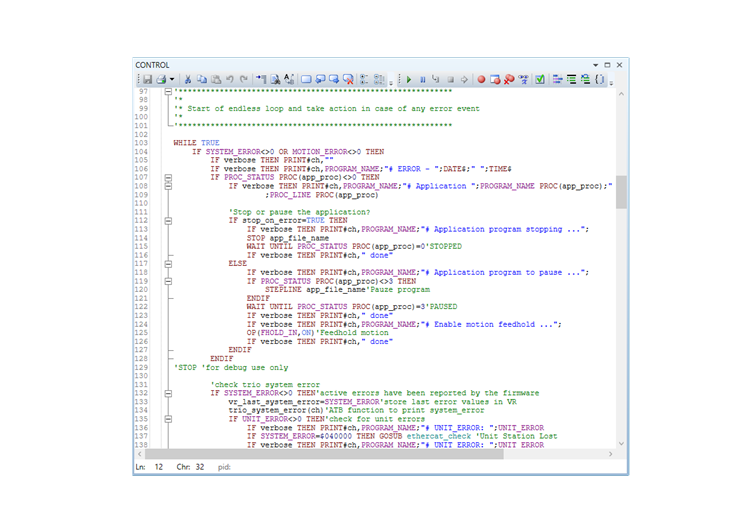
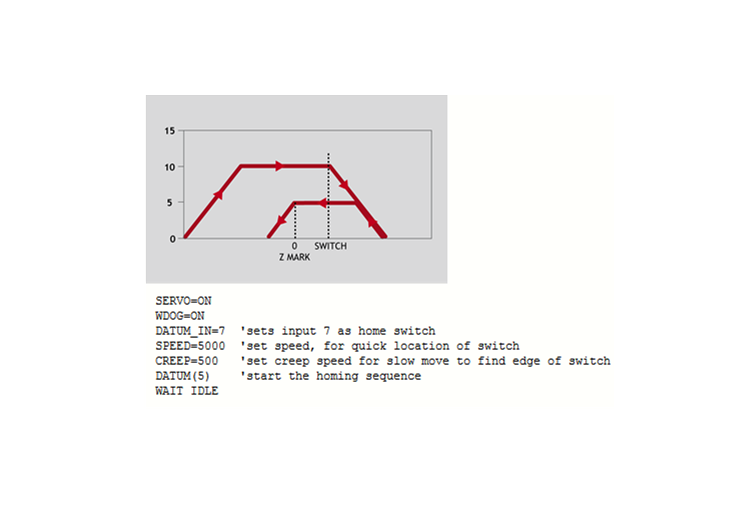
Motion Perfect is the development environment for the Trio Motion Coordinators range including the new Flex-6 Nano and MC6N-ECAT. It provides the user with an easy-to-understand Windows-based interface for rapid application development, controller configuration, and motion and controller function monitoring. In addition to the Trio MOTION-iX programming language, supported IEC languages and editor for HMI pages are available.
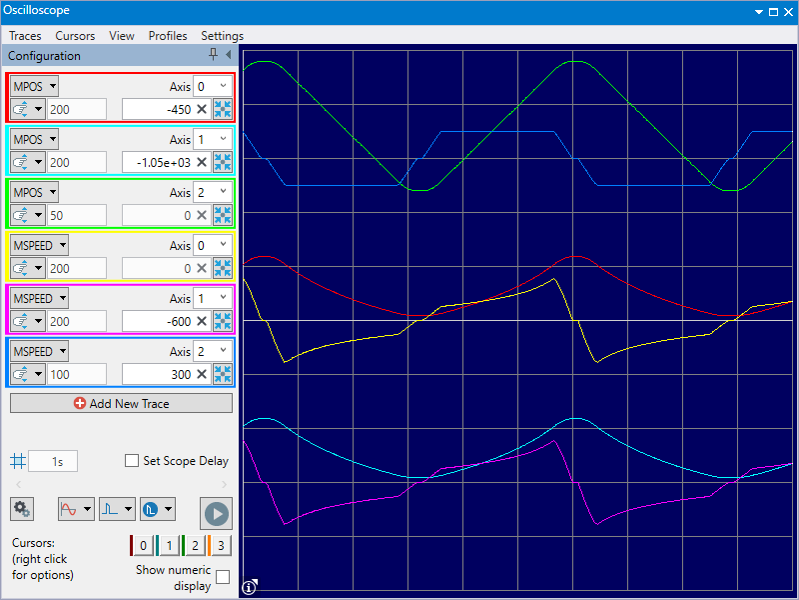
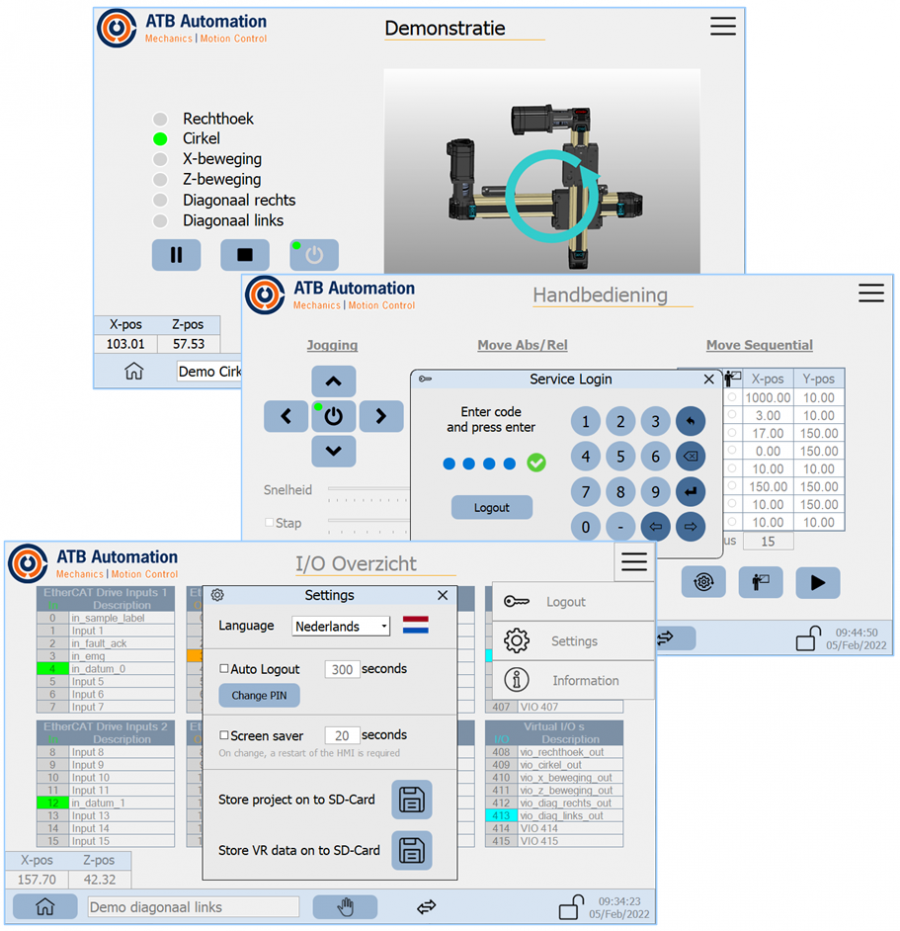
MotionPerfect also has a motion controller simulator and HMI Simulator program for offline programming. A 3D visualization tool is provided in the 2D / 3D oscilloscope to visualize the results.
 NL
NL FR
FR EN
EN