- >
- Nouvelles
- >
- Optimisation des processus de production avec un robot générique à 3 axes
Optimisation des processus de production avec un robot générique à 3 axes
Date: 2 avril 2019
L’entreprise AME d’Eindhoven fabrique différents produits pour divers clients. Les volumes sont tels qu’avec un degré d’automatisation suffisant, la production aux Pays-Bas est possible. De plus, AME cherche continuellement des moyens d’améliorer ses processus de production.
Yves Elmensdorp (ingénieur système chez AME) a examiné, dans le cadre de son travail de fin d’études, les possibilités d'amélioration du processus de production chez AME en utilisant un robot générique à 3 axes. Une partie de la mission comportait la fabrication d’un robot. Cela pouvait être soit au niveau des essais, soit au niveau de l'assemblage. Il fallait envisager aussi des actionneurs, une certaine précision et certaines spécifications pour obtenir de bons résultats. Dans ce cadre, Yves est entré en contact avec ATB Automation, qui possède à la fois le matériel et les connaissances en contrôle de mouvement nécessaires à un tel système.
Le robot à 3 axes
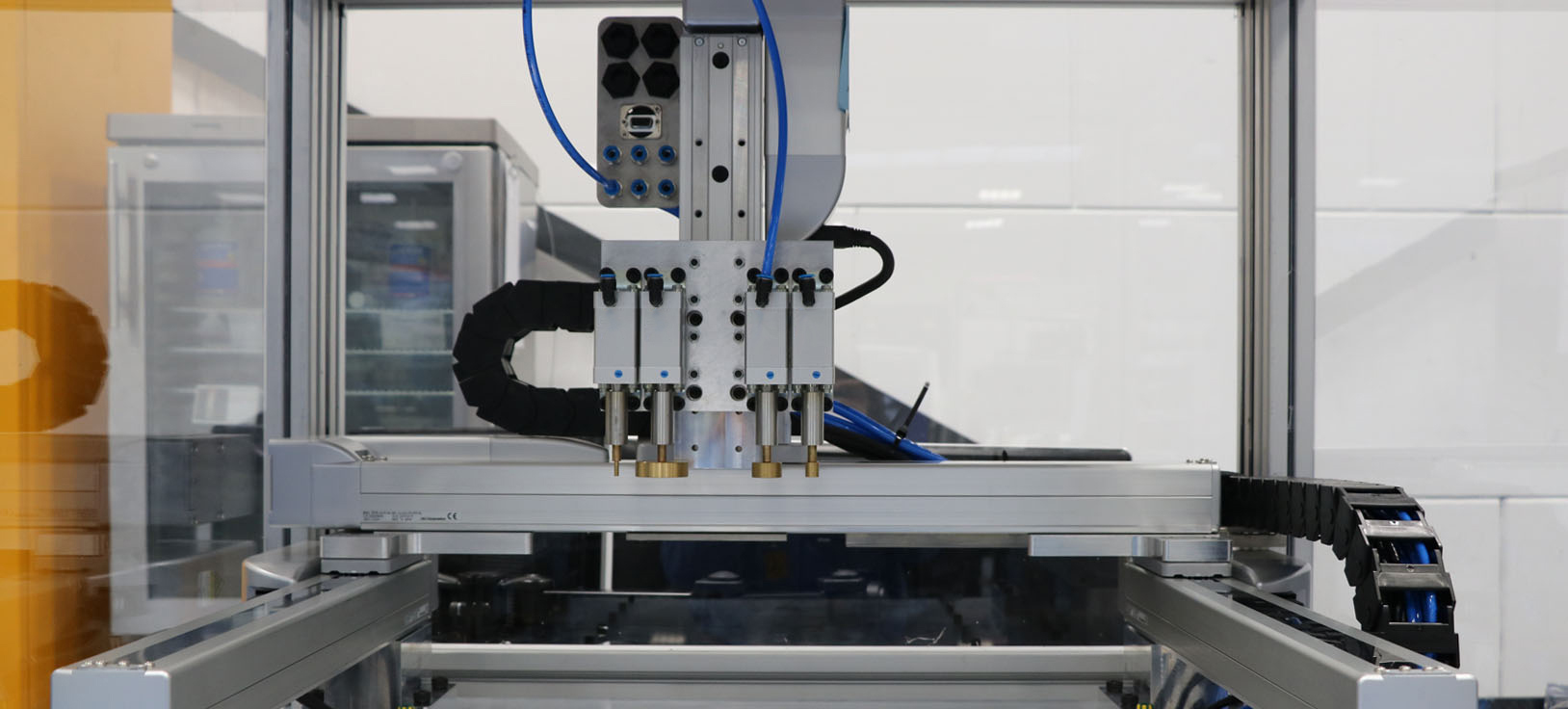
Nous sommes autorisés à jeter un coup d'œil à l'atelier AME où se trouvent les machines d’usinage des métaux et les robots d'assemblage, ainsi que le robot à 3 axes (travail de fin d’études). Avant d’entrer dans l’atelier, nous recevons un tablier en coton bleu et des bandes de mise à la terre à placer dans et autour de nos chaussures pour éviter l'électricité et les décharges électrostatiques. Le lieu de travail est spacieux et propre et nous avançons vers le robot à 3 axes.
L'application est un système robotisé à 3 axes sous la forme d'un pont en H. Cela implique qu'il y a 2 axes X, un axe Y et un axe Z. La spécificité de ce projet était le souhait de créer un système générique pouvant être utilisé pour les différents produits et processus de production. « Dans notre cas, cela signifie que vous disposez d’une plaque de produit spécifique. Une sorte de support du produit grâce auquel un outil spécifique peut être placé sur le robot sans avoir à reconstruire ce dernier en entier. La seule chose que vous auriez à faire avec notre système serait de retirer une partie de la plaque de base et d'en poser une nouvelle sans avoir à la visser, et à placer un outil spécifique sur le robot. Nous avons créé pour ce faire une sorte de support générique sur lequel vous pouvez facilement placer un nouvel outil à l’aide de 4 petites vis. Nous sommes en fait déjà si avancés qu’une nouvelle version nécessite un élément de logique », déclare Yves Elmensdorp.
Il y a un peu de logique dans le robot avec laquelle un contrôle est effectué, une sorte de reconnaissance d'identité. Cela permet de voir à l’aide du logiciel si le bon outil et la bonne plaque de produit sont installés, de façon à pouvoir détecter les erreurs. Cela nécessite une commande intelligente capable de contrôler le robot à 3 axes de manière souple et précise.
Une bonne combinaison
AME a trouvé chez ATB un fournisseur capable de fournir de bons conseils lors du processus préliminaire et d’apporter également les conseils et l'assistance nécessaires au processus de suivi. « Lorsque nous avons commencé avec la première version, les contributions et l’expertise d’ATB Automation au sujet du projet nous ont énormément aidés. Cela s’est avéré être une expérience positive », déclare Yves. Sur la base des spécifications, ATB a calculé quels axes linéaires IAI RoboCylinder étaient adaptés au robot à 3 axes. Pour les axes X et l’axe Y, nous sommes arrivés aux types RCP6-SA équipés de glissières et pour l'axe Z, nous avons choisi le RCP6-TA équipé d'une table à guidage robuste et convenant donc parfaitement aux applications verticales. En outre, ATB a donné des conseils sur les possibilités d’application d’un contrôleur de mouvement permettant d’exécuter d’autres applications directement sur cette plate-forme. Le résultat a été la mise en œuvre du TRIO PC-MCAT, un PC industriel avec contrôleur de mouvement intégré. Les modules TRIO Flexslice ont été utilisés à cette fin pour contrôler les axes linéaires et développer les E/S analogiques et numériques.

Les axes linéaires IAI RoboCylinder et le TRIO PC-MCAT correspondent bien à la nature précise de l'application. La précision désirée est largement atteinte sur un plan pratique, grâce à la combinaison de la précision des axes linéaires IAI et des possibilités offertes par le contrôleur de mouvement TRIO pour la programmation de mouvements interpolés précis.
« ATB Automation est un bon fournisseur. Une excellente entreprise en ce qui concerne l’assistance et la communication. L’assistance technique des ingénieurs d’application est rapide et surtout de bonne qualité. L’assistance commerciale est également souple et fiable en raison de son niveau technique élevé. »
L’utilisation de la vision
Une combinaison avec vision a été utilisée pour le premier développement du robot à 3 axes. Yves déclare : « Par exemple, nous utilisons une caméra pour aligner un certain produit. Pour coller un objet, par exemple une plaque de verre, vous voulez obtenir une certaine précision, par exemple 10 µm. Si votre produit est de travers de quelques micromètres, ce qui peut arriver en raison d'imprécisions dans le support, votre trait de colle sera également de travers. Pour une application avec du collage, nous choisissons alors une configuration avec caméra, car vous pouvez alors voir certains points de repère et ainsi ajuster le logiciel et obtenir la précision souhaitée. Nous avons pu facilement connecter ce système de vision directement sur le Trio PC-MCAT. »
Projet futur
AME crée sa propre interface utilisateur sur le robot générique à 3 axes dans un environnement C-sharp fonctionnant sur le PC-MCAT. Ce logiciel communique avec la partie contrôleur de mouvement. Le projet futur est d’adosser des robots 3 axes à un robot 6 axes. Le robot 6 axes est alors uniquement destiné à la 'manutention'. Le robot à 6 axes prend, par exemple, un morceau de verre ou de plastique et le place près d’un robot à 3 axes. Le robot à 3 axes est alors piloté depuis un système central. Le système central envoie des commandes normalisées au contrôleur de mouvement pour exécution. Voilà notre plan. Nous avons déjà effectué des essais au cours desquels nous envoyons des commandes standards d'un autre ordinateur vers le robot à 3 axes et cela fonctionne parfaitement », déclare Yves.
Qui est AME ?
AME, acronyme d’Applied Micro Electronics, est un développeur et producteur indépendant de produits électroniques de haute qualité, parmi les meilleurs du monde sur le plan technologique (Brainport Eindhoven). L’entreprise fabrique nombreux produits et l’éventail d’activité est très large, de l'automobile à l'énergie avec, par exemple, des convertisseurs d'énergie. « Nous fabriquons les produits pour tout ce qui, en fait, contient des produits. Cela peut être un circuit imprimé pour un client et uniquement la conception pour un autre client, mais il peut également s'agir d’un assemblage complet. Supposons qu'un client souhaite une interface utilisateur et qu'il ait une idée. Nous travaillons sur cela et le produisons ici », dit Yves Elmensdorp.
AME a pour objectif de fabriquer des produits innovants qui dépassent les attentes des clients. L’assistance d’ATB Automation nous y a bien aidés.
www.ame.nu
 NL
NL FR
FR EN
EN