Stöber SY6
Veiligheidsfunctie voor SB6,, SI6 of SC6 servoregelaar
- STO en SS1 via FSoE volgens EN 61800-5-2
- PLe (Cat. 4) volgens EN ISO 13849-1
- Geïntegreerd in SB6,, SI6 of SC6 servoregelaar
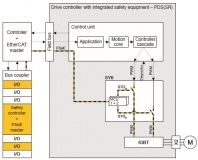
De SY6 veiligheidsfunctie is een uitbreiding van de SB6, SI6 of SC6 servoregelaar. Met de SY6 optie kan de servoregelaar worden opgenomen in het veiligheidscircuit als “safety related part of the control system” (SRP/CS) voor het redundant uitschakelen van het motor/actuator koppel (Safe torque off, STO).

De veiligheidsfunctie heeft een twee kanaals ontwerp. Beide kanalen STOa en STOb zijn onafhankelijk en moeten allebei niet actief zijn om het motorkoppel in te kunnen schakelen (STO functie niet actief). Met de STO functie actief wordt het PWM signaal naar de vermogenstrap van de servoregelaar redundant uitgeschakeld door de SY6 module zodat de motor geen koppel meer kan leveren.
De SY6 veiligheidsmodule implementeert een FSoE (Fale Safe over EtherCAT) slave. Deze wisselt control en status informatie uit met de FSoE master via de EtherCAT master volgens het “black channel” principe (veiligheids protocol over een standaard netwerk kanaal). De FSoE slave ontvangt de veiligheidsgerelateerde gegevens, controleert deze op plausibiliteit en schakelt de twee veiligheidskanalen naar de vermogenstrap in of uit.
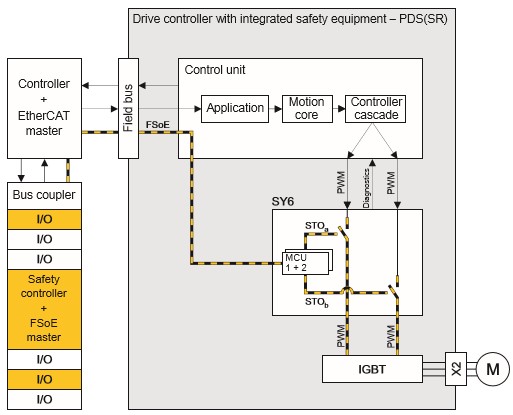
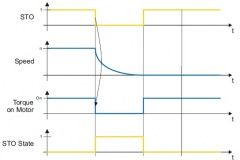
De SY6-veiligheidsmodule ondersteunt de Safe Torque Off (STO) en Safe Stop 1 (SS1-t) veiligheidsfuncties volgens EN 61800-5-2. De veiligheidsbesturing (veiligheids-PLC) moet zowel de STO als de SS1-uitgang van de SI6/SC6 servoregelaar activeren om de servomotor koppel te laten leveren. Als slechts een van de uitgangen is geconfigureerd blijft de SI6/SC6 servoregelaar in een veilige toestand (STO actief).
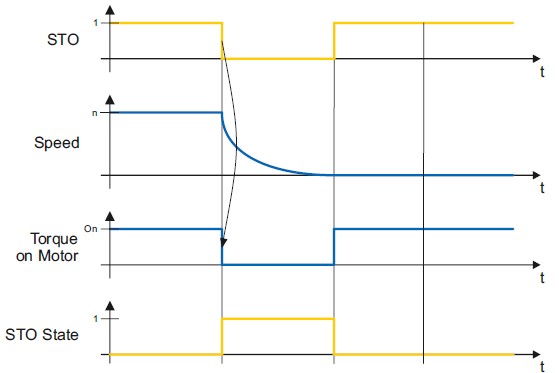
In onderstaand plaatje is het signaalverloop van de STO functie volgens stop categorie 0 in overeenstemming met EN 60204-1 weergegeven.
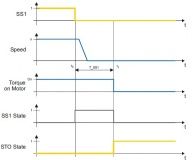
SS1 komt overeen met stopcategorie 1 in overeenstemming met EN 60204-1.
De SS1-t-veiligheidsfunctie zorgt voor de tijdgecontroleerde stilstand van een motor met daarop volgend een koppelvrije toestand (STO wordt geactiveerd na een tijdsvertraging), ongeacht of de motor al tot stilstand is gekomen.
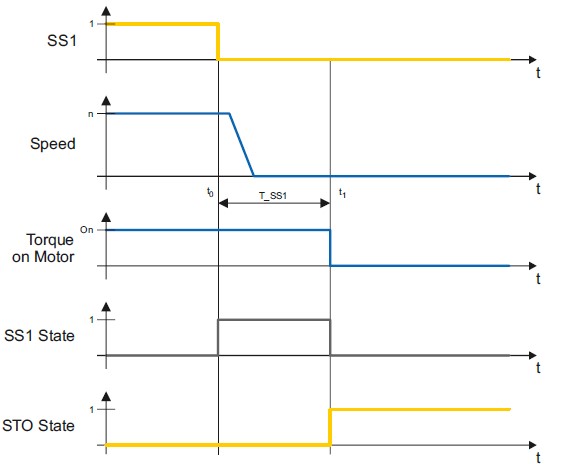
De SS1-vertragingstijd T_SS1 is een veiligheidsgerelateerde parameter die vanuit de veiligheidsbesturing (veiligheids-PLC) wordt gedefinieerd.
De veiligheidsfuncties STO en SS1-t hebben betrekking op de complete SI6 of SC6 module en zijn niet asspecifiek. Op dubbele-as controllers, worden beide assen tegelijkertijd in een veilige toestand gebracht. Een geactiveerde SS1 kan niet worden onderbroken.
 NL
NL FR
FR EN
EN